Ultima semana
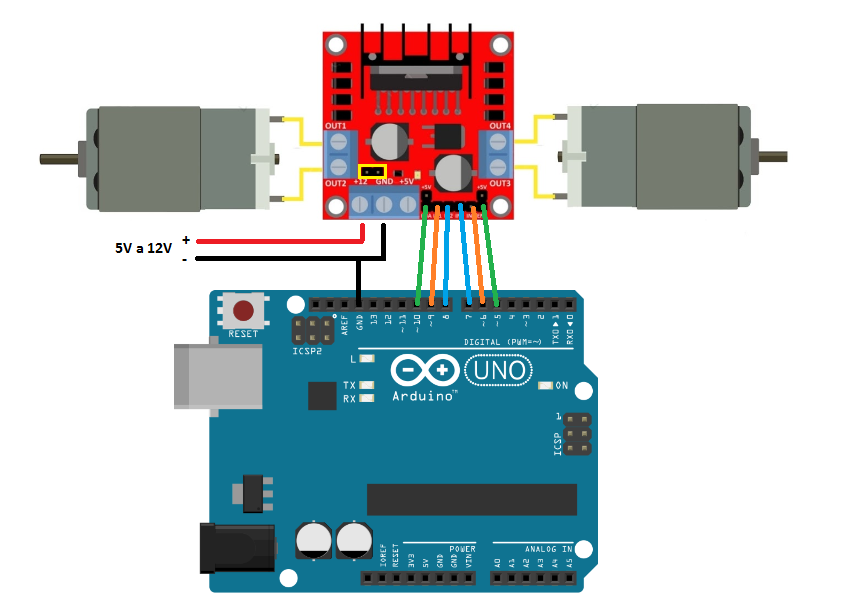
Este día básicamente realizamos la programación de la aplicación que controlar todo el mecanismo y el circuito de el carro a control remoto del proyecto:
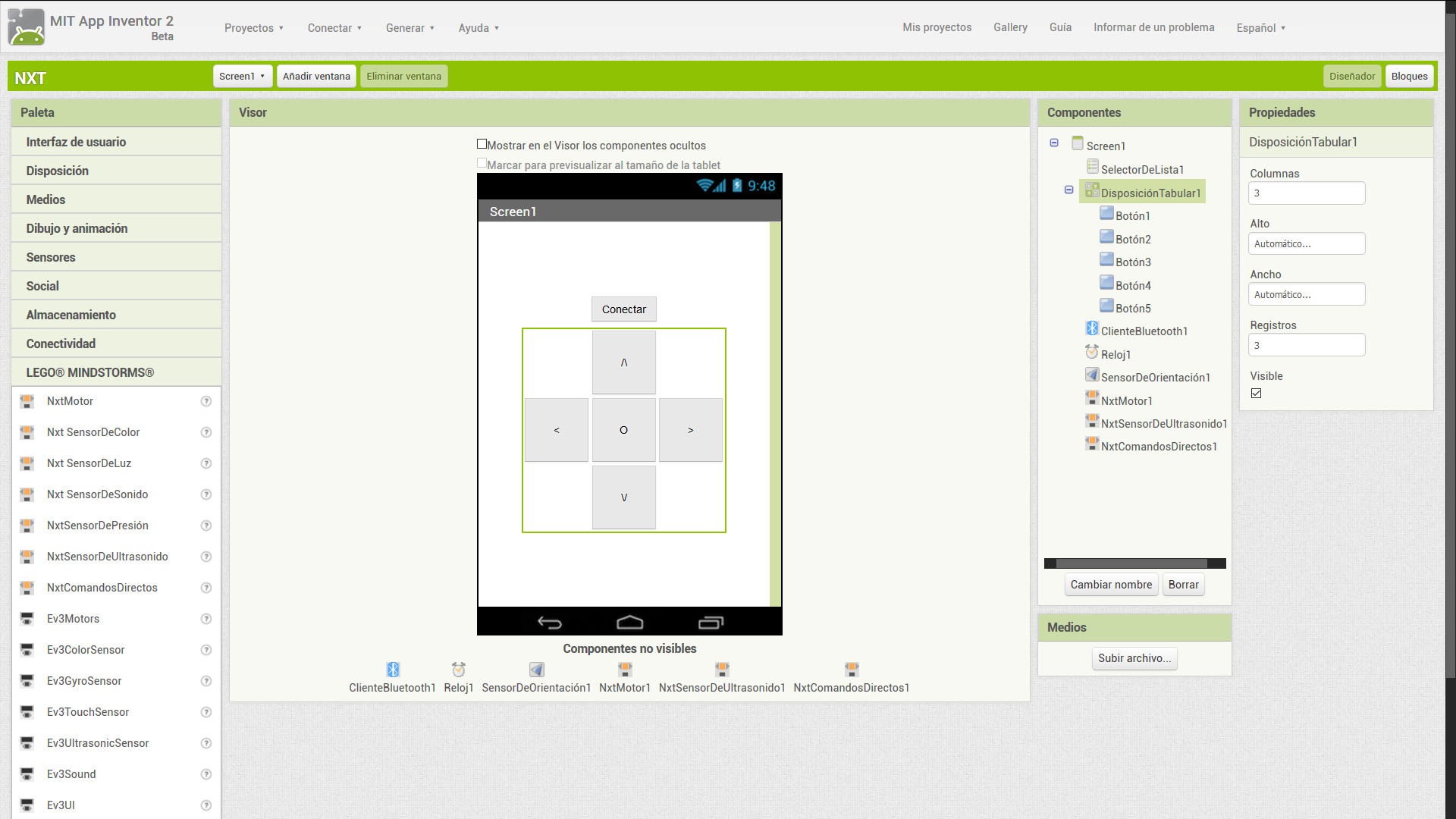
Primero realizamos la parte que consistiría en la "pagina principal del carro a control remoto" es decir la pagina que veríamos cuando sea la hora de activar. En ella incluimos flechas que permitirían controlar si va hacia adelante, abajo la derecha y/o la izquierda además de opciones como encendido, apagado y a opción que nos permitirá conectarnos al bluetooth del celular gracias al sensor bluetooth HC-06.

Conclusión:
Los bloques fueron modificados ya que agregue mas opciones en el área de los botones ya que permitirá controla el sistema de ventilación y la puerta del garaje por separado con distintas serie de botones pero con respecto al resto de las características de los bloque s se dejaron exactamente igual que antes.
Conclusión:
En conclusión en esta clase de robótica pudimos avanzar con la aplicación móvil para el "Bluetooth HC06", lo cual nos servirá mucho en nuestro carro a control remoto.
Logros:
Mi grupo y yo logramos terminar con éxito, las configuraciones que realizamos en la aplicación móvil "APP INVENTOR".
Dificultades:
Nos resultó un poco difícil a mi grupo y a mí fue conocer bien como subir la app al celular sin ningún inconveniente.
¿Qué me pregunto?
Como alcanzaremos ha terminar a tiempo con los recortes de tiempo que tuvimos debido a la circunstancias como las fiestas de navidad..
Como alcanzaremos ha terminar a tiempo con los recortes de tiempo que tuvimos debido a la circunstancias como las fiestas de navidad..